


Main tasks in Computer Vision:
- Regression: Output variable takes continuous value. E.g. Distance to target
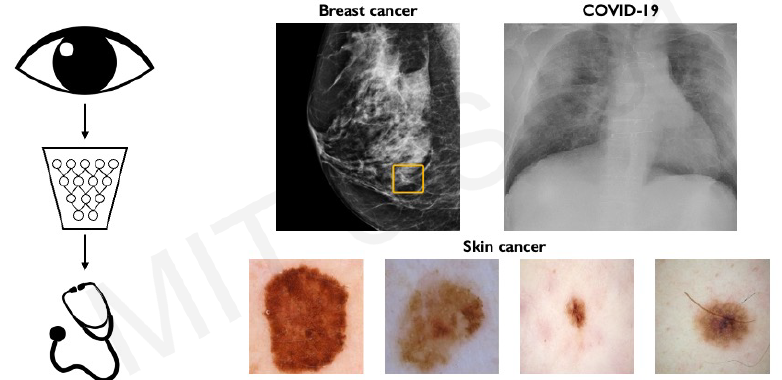
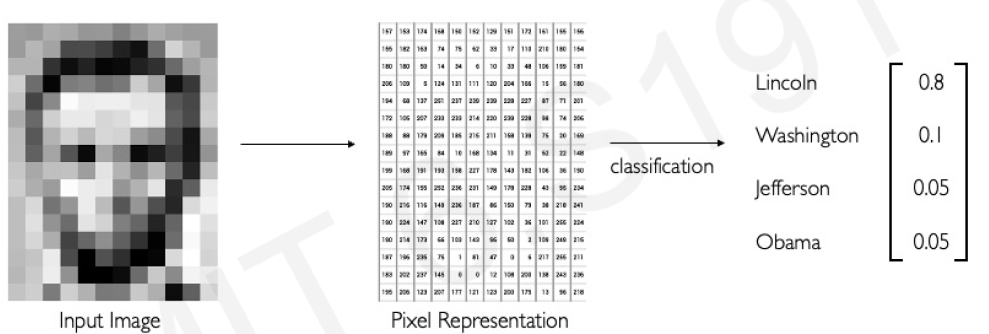
- Classification: Output variable takes class labels. E.g. Probability of belonging to a class
source: MIT Course, http://introtodeeplearning.com/, L3